Poisson Equation (Steady-State Diffusive Equation)
The Poisson is partial differential equation employed to represent problems as the pressure distribution over steady-state in space. It is characterized by a steady-state version of the difusive equation, i.e, the parameter is independent of time. The partial differential equation is given by
where \(p\) is the pressure and \(\nu\) diffusive control paremeter.
Numerical Discretization

Fig. 4 1D regular grid example for diffusive equation.
FDM Discretization
Discretizing the Eq. (18) through finite diference method, we have for forward time and central space (FTCS) discretizations:
for \(\nu\) constant and isolating the term \(u(x,t + \Delta_{t})\), we can describe the \(p\) time evolution:
Lattice Boltzmann Equation
Describing the problem through the BGK lattice Boltzmann equation (BGK-LB) for the lattice D1Q3:
the equilibrium distribution function is defined by
where \(\widehat{p}\) is a shifted pressure, shifted by a reference constant pressure \(p_{0}\), i.e., \(p=p_{0}+\widehat{p}\) (This assumption is necessary due to pressure by definition can not be negative, but negative pressure values can be found depending of initial simulation set). The equilibrium moments are given by
Through Chapman–Enskog analysis, it is demonstrated that the first-order non-equilibrium moment describes the pressure gradient and, consequently, the average velocity:
Lattice Direction Moments
Show code cell source
import warnings
warnings.filterwarnings("ignore")
from pylab import *
from __future__ import division
from sympy import *
import numpy as np
from sympy import S, collect, expand, factor, Wild
from sympy import fraction, Rational, Symbol
from sympy import symbols, sqrt, Rational
import sympy as sp
from IPython.display import display, Math, Latex
#-------------------------------------------------Símbolos----------------------------------------------
omega, p, w = symbols('omega, \widehat{p}, w')
wi, cx, cy, cs = symbols('w_{i} c_{x} c_{y} c_{s}')
fi, f0, f1, f2, f3, f4, f5, f6, f7, f8, = symbols('f_{i} f_{0} f_{1} f_{2} f_{3} f_{4} f_{5} f_{6} f_{7} f_{8}')
#-------------------------------------------------Funções----------------------------------------------
feq = Function('feq')(wi, cx, cy)
fneq = Function('fneq')(wi, cx, cy)
f = Function('f')(fi)
#-------------------------------------------------Variáveis----------------------------------------------
fi=np.array([f1,f2,f3,f4,f5,f6,f7,f8])
w0=Rational(4,9);w1=Rational(1,9);w2=Rational(1,36)
wi=np.array([w0,w1,w1,w1,w1,w2,w2,w2,w2])
cx=np.array([0,1,0,-1,0,1,-1,-1,1])
cy=np.array([0,0,1,0,-1,1,1,-1,-1])
as2=Rational(3)
cs2=1/as2
#-------------------------------------------------Calc.Func------------------------------------------------
f= fi
feq=wi*p
feq[0]=(w0-1)*p
Show code cell source
a00=simplify(sum(feq))
a0=simplify(sum(feq[1:]))/(1-w0)
ax=simplify(sum(feq*cx))
ay=simplify(sum(feq*cy))
axx=simplify(sum(feq*cx*cx))
axy=simplify(sum(feq*cx*cy))
ayy=simplify(sum(feq*cy*cy))
display(Math(r"\underbrace{\sum_{i=0} f_{i}^{eq} =\sum_{i=0} f_{i} }_{\textrm{Zero-Order Moment}} =" + sp.latex(a00)
+r",\quad \quad \underbrace{\frac{1}{1-w_{0}}\sum_{i=1} f_{i}^{eq} = \frac{1}{1-w_{0}}\sum_{i=1} f_{i} }_{\textrm{Zero-Order Moment}} =" + sp.latex(a0)
+r",\quad \quad \underbrace{\sum_{i=0} f_{i}^{eq}c_{i,x} }_{\textrm{x-First-Order Moment}} =" + sp.latex(ax)
+r",\quad \quad \underbrace{\sum_{i=0} f_{i}^{eq}c_{i,y} }_{\textrm{y-First-Order Moment}} =" + sp.latex(ay)
+r",\\ \quad \quad \underbrace{\sum_{i=0} f_{i}^{eq}c_{i,x}c_{i,x} }_{\textrm{xx-Second-Order Moment}} =" + sp.latex(axx)
+r",\quad \quad \underbrace{\sum_{i=0} f_{i}^{eq}c_{i,x}c_{i,y} }_{\textrm{xy-Second-Order Moment}} =" + sp.latex(axy)
+r" \quad \quad and \quad \quad \underbrace{\sum_{i=0} f_{i}^{eq}c_{i,y}c_{i,y} }_{\textrm{yy-Second-Order Moment}} =" + sp.latex(ayy)))
Chapmann-Enskog Analysis
Applying the Chapmann-Enskog procedure to LB equation, we expand the term \(f_{i}\left(\boldsymbol{x}+\boldsymbol{e}_i \Delta t, t+\Delta t\right)\) in a Taylor series to recover the derivative form of the equation, i.e.,
Rescaling the dimensionless form of the Eq. (28) in terms of the Knudsen number (\(Kn\)), we have
applying the asymptotic expansion in both the distribution function (\(f_{i}=f_{i}^{(0)}+Kn f_{i}^{(1)} + Kn^{2} f_{i}^{(2)}+\cdots\)) and time partial derivative (\(\partial_{t}=\partial_{t}^{(0)}+ Kn \partial_{t}^{(1)}+Kn^{2} \partial_{t}^{(2)}+\cdots\)), and separating the equation in orders up to the order \(Kn^{2}\):
Zero-Order Moment Balance
To retrieve the balance equation, we sum the Eq. (29) for \(Kn^{(1)}\) and \(Kn^{(2)}\) over \(\sum_{i=0} \):
and
or
where \(m^{(1)}_{\alpha}\) is the first-order moment of \(f_{i}^{(1)}\) and \(1/(1-w_{0})\sum_{i=1}f_{i}^{(j)}=0\) for \(j\geq 1\) due to imposition of \(\widehat{p}\) conservation. To compute the moment \(m^{(1)}_{\alpha}\), we multiply Eq. (29) by \(c_{i,\alpha}\) and sum over all lattice directions:
By substituting Eq. (31) into Eq. (30), we recover the Eq. (25), where \(\nu=c_{s}^{2}(\tau-1/2)\). In the regularized formulation of the lattice Boltzmann equation, the first-order correction is approximated as \(f_{i}^{(1)}\approx (f_{i}-f_{i}^{(0)})=f_{i}^{neq}\), where higher-order Knudsen moments are filtered out and the collision term is reformulated in terms of \(f_{i}^{neq}\).
Boundary Conditions
The boundary conditions for the lattice D2Q5 can be derived by solving a linear system of known moments, as illustrated in Boundary Conditions: Deduction for the Lattice D2Q5 - Poisson Equation. For the D2Q5 lattice, the unknown distribution functions at each boundary are determined as summarized in Table below.
Boundaries |
Layers |
|||
|---|---|---|---|---|
North |
South |
|||
Unknown \(f_{i}\) |
\(f_2=\widehat{p}_{n}(1-w_{0}) - (f_1+f_3+f_4)\) |
\(f_4=\widehat{p}_{s}(1-w_{0}) - (f_1+f_2+f_3)\) |
||
East |
West |
|||
\(f_3=\widehat{p}_{e}(1-w_{0}) - (f_1+f_2+f_4)\) |
\(f_1=\widehat{p}_{w}(1-w_{0}) - (f_2+f_3+f_4)\) |
|||
Boundaries |
Concave Corners |
|||
Northwest |
Northeast |
|||
Unknown \(f_{i}\) |
\(f_1=-(\partial_{x}\widehat{p}+\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_2 + \widehat{p}_{nw}/3\) |
\(f_3=(\partial_{x}\widehat{p}-\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_2 + \widehat{p}_{ne}/3\) |
||
\(f_4=(\partial_{x}\widehat{p}+\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_3 + \widehat{p}_{nw}/3\) |
\(f_4=-(\partial_{x}\widehat{p}-\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_1 + \widehat{p}_{ne}/3\) |
|||
Southwest |
Southeast |
|||
\(f_1=-(\partial_{x}\widehat{p}-\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_4 + \widehat{p}_{sw}/3\) |
\(f_2=-(\partial_{x}\widehat{p}+\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_1 + \widehat{p}_{se}/3\) |
|||
\(f_2=(\partial_{x}\widehat{p}-\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_3 + \widehat{p}_{sw}/3\) |
\(f_3=(\partial_{x}\widehat{p}+\partial_{y}\widehat{p})\tau c_{s}^{2}/2 - f_4 + \widehat{p}_{se}/3\) |
1st Benchmark: Single sine mode on a finite rod (Dirichlet)
PDE: \((\phi_t = \partial_{x}(\nu\partial_{x}\phi), (0<x<L,\ t>0)\)
BC: \((\phi(0,t)=\phi(L,t)=0)\)
IC: \(\phi(x,0)=\sin \left(\frac{\pi x}{L}\right)\)
Solution
FDM Solution:
Show code cell source
import warnings
warnings.filterwarnings("ignore")
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
matplotlib.rcParams['mathtext.fontset'] = 'cm'
#--------------------------------------- Parameters (physical units) ------------------------------------------
L = 1.0 # Length of the domain
nu = 0.1/3.0 # Diffusion coefficient
t_end = 2.0 # Total simulation time
#------------------------------------- Parameters (numerical units) -------------------------------------------
Nx=21 #Square Domain Length
dx = L / (Nx-1) # Spatial step size
c=1.0*2**(2) # c=dx/dt
dt=dx/c # Time step size
nt = int(t_end / dt) # Time step number
print(f"dx={dx:.4e}\t dt={dt:.4e}\t nt={nt:d}") # Print values for check
#----------------------------------- Initialization - Numerical Arrays ----------------------------------------
Tf = np.zeros((Nx),dtype="float64")
x = np.linspace(0, Nx-1, Nx)
Tf = np.sin(np.pi * x / (Nx-1))
Tfp = np.zeros((Nx),dtype="float64")
AvTf = np.zeros((nt),dtype="float64")
#----------------------------------------- Maind Loop --------------------------------------------------------
for t in range(nt):
Tfp[:] = ( np.roll(Tf[:], 1, axis=0) + np.roll(Tf[:], -1, axis=0) ) / 2.0
Tf[:]=Tfp[:]
Tf[0]= 0.0
Tf[Nx-1]= 0.0
AvTf[t]=np.sum(Tf)/Nx;
Show code cell output
dx=5.0000e-02 dt=1.2500e-02 nt=160
LBM D1Q3 Solution With Steady-Scheme:
Show code cell source
import warnings
warnings.filterwarnings("ignore")
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
matplotlib.rcParams['mathtext.fontset'] = 'cm'
#--------------------------------------- Parameters (physical units) ------------------------------------------
L = 1.0 # Length of the domain
nu = 0.1/3.0 # Diffusion coefficient
t_end = 2.0 # Total simulation time
#--------------------------------------- Lattice-Properties-D1Q3 ----------------------------------------------
cs=1.0/np.sqrt(3.0);
w = np.array([4.0/6.0, 1.0/6.0, 1.0/6.0],dtype="float64")
cx = np.array([0, 1, -1],dtype="int8")
#------------------------------------- Parameters (numerical units) -------------------------------------------
Nx=21 #Square Domain Length
dx = L / (Nx-1) # Spatial step size
c=1.0*2**(2) # c=dx/dt
dt=dx/c # Time step size
nt = int(t_end / dt) # Time step number
nue=nu/(c*dx) # Diffusion coefficient
tau=nue/cs**2+0.5 # Relaxation Time
print(f"dx={dx:.4e}\t dt={dt:.4e}\t nt={nt:d}") # Print values for check
print(f"nue={nue:.4f}\t tau={tau:.4f}")
#--------------------------------- Initialization - Numerical Arrays -----------------------------------------
T = np.zeros((Nx),dtype="float64")
x = np.linspace(0, Nx-1, Nx)
T = np.sin(np.pi * x / (Nx-1))
f = np.zeros((3,Nx),dtype="float64")
fp = np.zeros((3,Nx),dtype="float64")
AvT = np.zeros((nt),dtype="float64")
for k in range(0,3):
fp[k,:]=w[k]*T[:]
#----------------------------------------- Maind Loop --------------------------------------------------------
for t in range(nt):
#-----------------streaming-------------------
for k in range(0,3):
f[k,:]=np.roll(fp[k,:], cx[k], axis=0)
#-----------------Boundaries-----------------------
f[1,0]= 0.0 - f[0,0]-f[2,0]
f[2,Nx-1]= 0.0 - f[0,Nx-1]-f[1,Nx-1]
#----------------------Macro------------------
T[:] = (f[1,:]+f[2,:])/(1-w[0])
AvT[t]=np.sum(T)/Nx;
#--------------------Collision----------------
fp[0,:]=f[0,:] - (f[0,:] - (w[0]-1)*T[:])/tau
fp[1,:]=f[1,:] - (f[1,:] - w[1]*T[:])/tau
fp[2,:]=f[2,:] - (f[2,:] - w[2]*T[:])/tau
Show code cell output
dx=5.0000e-02 dt=1.2500e-02 nt=160
nue=0.1667 tau=1.0000
LBM D1Q2 Solution (Not Accept the Steady-Scheme):
Show code cell source
import warnings
warnings.filterwarnings("ignore")
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
matplotlib.rcParams['mathtext.fontset'] = 'cm'
#--------------------------------------- Parameters (physical units) ------------------------------------------
L = 1.0 # Length of the domain
nu = 0.1/2.0 # Diffusion coefficient
t_end = 2.0 # Total simulation time
#--------------------------------------- Lattice-Properties-D1Q2 ----------------------------------------------
cs=1.0/np.sqrt(2.0);
w = np.array([1.0/2.0, 1.0/2.0],dtype="float64")
cx = np.array([1, -1],dtype="int8")
#------------------------------------- Parameters (numerical units) -------------------------------------------
Nx=21 # Square Domain Length
dx = L / (Nx-1) # Spatial step size
c=1.0*2**(2) # c=dx/dt
dt=dx/c # Time step size
nt = int(t_end / dt) # Time step number
nue=nu/(c*dx) # Diffusion coefficient
tau=nue/cs**2+0.5 # Relaxation Time
print(f"dx={dx:.4e}\t dt={dt:.4e}\t nt={nt:d}") # Print values for check
print(f"nue={nue:.4f}\t tau={tau:.4f}")
#--------------------------------- Initialization - Numerical Arrays -----------------------------------------
T2 = np.zeros((Nx),dtype="float64")
x = np.linspace(0, Nx-1, Nx)
T2 = np.sin(np.pi * x / (Nx-1))
f = np.zeros((2,Nx),dtype="float64")
fp = np.zeros((2,Nx),dtype="float64")
AvT2 = np.zeros((nt),dtype="float64")
fp[0,:]=w[0]*T2[:]
fp[1,:]=w[1]*T2[:]
#----------------------------------------- Maind Loop --------------------------------------------------------
for t in range(nt):
#-----------------streaming-------------------
f[0,:]=np.roll(fp[0,:], cx[0], axis=0)
f[1,:]=np.roll(fp[1,:], cx[1], axis=0)
#-----------------Boundaries-----------------------
f[0,0]= 0.0 - f[1,0]
f[1,Nx-1]= 0.0 - f[0,Nx-1]
#----------------------Macro------------------
T2[:] = f[0,:]+f[1,:]
AvT2[t]=np.sum(T2)/Nx;
#--------------------Collision----------------
fp[0,:]=f[0,:] - (f[0,:] - w[0]*T2[:])/tau
fp[1,:]=f[1,:] - (f[1,:] - w[1]*T2[:])/tau
Show code cell output
dx=5.0000e-02 dt=1.2500e-02 nt=160
nue=0.2500 tau=1.0000
LBM D1Q3 Solution (Transient):
Show code cell source
import warnings
warnings.filterwarnings("ignore")
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
matplotlib.rcParams['mathtext.fontset'] = 'cm'
#--------------------------------------- Parameters (physical units) ------------------------------------------
L = 1.0 # Length of the domain
nu = 0.1/3.0 # Diffusion coefficient
t = 2.0 # Total simulation time
#--------------------------------------- Lattice-Properties-D1Q3 ----------------------------------------------
cs=1.0/np.sqrt(3.0);
w = np.array([4.0/6.0, 1.0/6.0, 1.0/6.0],dtype="float64")
cx = np.array([0, 1, -1],dtype="int8")
#------------------------------------- Parameters (numerical units) -------------------------------------------
Nx=21 # Square Domain Length
dx = L / (Nx-1) # Spatial step size
c=1.0*2**(2) # c=dx/dt
dt=dx/c # Time step size
nt = int(t / dt) # Time step number
nue=nu/(c*dx) # Diffusion coefficient
tau=nue/cs**2+0.5 # Relaxation Time
print(f"dx={dx:.4e}\t dt={dt:.4e}\t nt={nt:d}") # Print values for check
print(f"nue={nue:.4f}\t tau={tau:.4f}")
#--------------------------------- Initialization - Numerical Arrays -----------------------------------------
Tt = np.zeros((Nx),dtype="float64")
x = np.linspace(0, Nx-1, Nx)
Tt = np.sin(np.pi * x / (Nx-1))
f = np.zeros((3,Nx),dtype="float64")
fp = np.zeros((3,Nx),dtype="float64")
AvTt = np.zeros((nt),dtype="float64")
for k in range(0,3):
fp[k,:]=w[k]*Tt[:]
#----------------------------------------- Maind Loop --------------------------------------------------------
for t in range(nt):
#-----------------streaming-------------------
for k in range(0,3):
f[k,:]=np.roll(fp[k,:], cx[k], axis=0)
#-----------------Boundaries-----------------------
f[1,0]= 0.0 - f[0,0]-f[2,0]
f[2,Nx-1]= 0.0 - f[0,Nx-1]-f[1,Nx-1]
#----------------------Macro------------------
Tt[:]=f[0,:]+f[1,:]+f[2,:]
AvTt[t]=np.sum(Tt)/Nx;
#--------------------Collision----------------
for k in range(0,3):
fp[k,:]=f[k,:] - (f[k,:] - w[k]*Tt[:])/tau
Show code cell output
dx=5.0000e-02 dt=1.2500e-02 nt=160
nue=0.1667 tau=1.0000
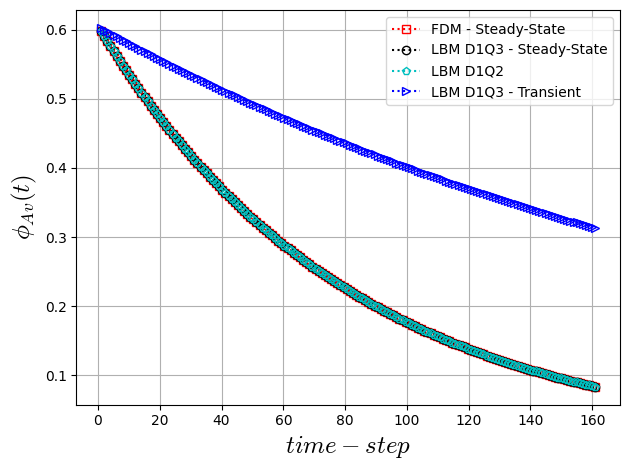
Numerical and Analytical Comparisson:
Show code cell source
xl = np.linspace(1, nt+1, nt)
plt.plot(xl, AvTf, 'rs:' ,label='FDM - Steady-State',fillstyle='none')
plt.plot(xl, AvT, 'ko:' ,label='LBM D1Q3 - Steady-State',fillstyle='none')
plt.plot(xl, AvT2, 'cp:' ,label='LBM D1Q2',fillstyle='none')
plt.plot(xl, AvTt, 'b>:' ,label='LBM D1Q3 - Transient',fillstyle='none')
plt.xlabel(r"$time-step$",fontsize=18)
plt.ylabel(r"$\phi_{Av}(t)$",fontsize=18)
plt.legend(fontsize=10)
plt.grid(True)
plt.tight_layout()
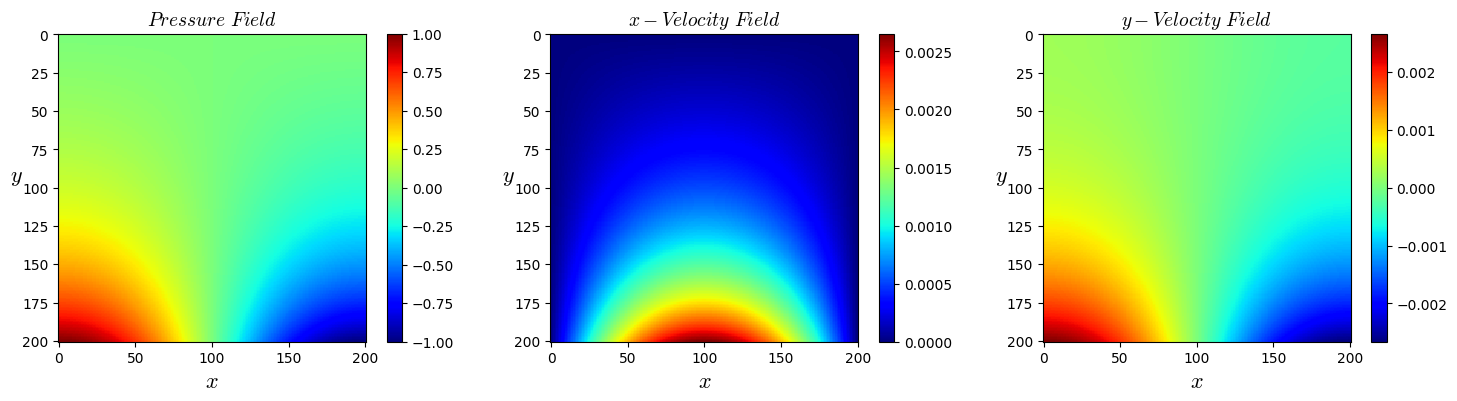
2nd Benchmark: 2D Poisson Pressure Field
Analyzing the accuracy of Poisson equation solver, we apply it to a two-dimensional analytical case. The geometry is described by a square domain of length \(L\) initialized with a constant dimensionless pressure \(\widehat{p}(x,y,t=0)=0\). The boundary conditions of the geometry are given by
The pressure analytical solution for Eq. (25) pressure is given
where \(Dp_{0}\) is considered equal to 1, consequently, velocity values can be analytically obtained by the equation:
LBM D2Q5 Code
Show code cell source
import warnings
warnings.filterwarnings("ignore")
import numpy as np
import matplotlib.pyplot as plt
import matplotlib
matplotlib.rcParams['mathtext.fontset'] = 'cm'
#--------------------------------------- Parameters (physical units) ------------------------------------------
#------------Dimensionless-Data----------------
Lo = 1.0 # Length of the square domain
Do = 1.0 # Diffusion coefficient
t_end = 0.1 # Total simulation time
#--------------------------------------- Lattice-Properties-D2Q5 ----------------------------------------------
cs = 1.0 / np.sqrt(3.) #Lattice sound speed
w = np.array([2.0/6.0, 1.0/6.0, 1.0/6.0, 1.0/6.0, 1.0/6.0],dtype="float64") # Lattice weights
cx = np.array([0, 1, 0, -1, 0],dtype="int16") # Lattice vectors
cy = np.array([0, 0, 1, 0, -1],dtype="int16") # Lattice vectors
#------------------------------------- Parameters (numerical units) -------------------------------------------
Nx=201 #Square Domain Length
Ny=Nx
dx = Lo/(Nx-1);
rel = 2.0**9.21 *2**(1);
dt = dx / rel;
D = dt * Do / (dx * dx);
tau = (D / (cs * cs)) + (1. / 2.);
mstep= int(t_end / dt) # Time step number
print(f"dx={dx:.4e}\t dt={dt:.4e}\t mstep={mstep:d}") # Print values for check
print(f"D={D:.4f}\t tau={tau:.4f}")
Show code cell output
dx=5.0000e-03 dt=4.2214e-06 mstep=23688
D=0.1689 tau=1.0066
Show code cell source
#--------------------------------- Initialization - Initial Condition -------------------------------------
x=np.linspace(0.0,Lo,Nx) #x-array Length
y=np.linspace(0.0,Lo,Ny) #y-array Length
p=np.zeros((Nx,Ny),dtype="float64") #Allocating Pressure Field
# ------------------------North-Boundary---------------------------------
p[:,Ny-1]=0 #North Boundary
dxpn=np.zeros((Nx),dtype="float64") #Allocating Pressure Field
dxpn[:]=0*dx # dxp North Boundary (To be used in Corner BC)
# ------------------------South-Boundary---------------------------------
p[:,0]=np.cos(np.pi*x[:]) #Pressure South Boundary
dxps=np.zeros((Nx),dtype="float64") #Allocating Grad-Pressure
dxps[:]=-np.pi*np.sin(np.pi*x[:])*dx # dxp South Boundary (To be used in Corner BC)
# ------------------------West-Boundary---------------------------------
p[0,:]=np.sinh(np.pi*(1-y[:]))/np.sinh(np.pi) #West Boundary
dypw=np.zeros((Ny),dtype="float64") #Allocating Grad-Pressure
dypw[:]=-np.pi*np.cosh(np.pi*(1-y[:]))/np.sinh(np.pi)*dx # dyp West Boundary (To be used in Corner BC)
# ------------------------East-Boundary---------------------------------
p[Nx-1,:]=-np.sinh(np.pi*(1-y[:]))/np.sinh(np.pi) #East Boundary
dype=np.zeros((Ny),dtype="float64") #Allocating Grad-Pressure
dype[:]=np.pi*np.cosh(np.pi*(1-y[:]))/np.sinh(np.pi)*dx # dyp East Boundary (To be used in Corner BC)
#----------------------------- Initialization - Distribution Function --------------------------------------
f=np.zeros((5,Nx,Ny),dtype="float64") #Allocating Distribution Function
fp=np.zeros((5,Nx,Ny),dtype="float64") #Allocating Post-Colisional Distribution Function
f[0,:,:]=(w[0]-1.0)*p[:,:]
for k in range(1,5):
fp[k,:,:]=w[k]*p[:,:]
Show code cell source
import time
start=time.time()
for kk in range(0,mstep):
#*******Streaming********
for k in range(0,5):
f[k,:,:]=np.roll(np.roll(fp[k,:,:], cx[k], axis=0), cy[k], axis=1)
#************Boundary-Conditions**********
f[4,1:-1,Ny-1]=-(f[1,1:-1,Ny-1]+f[2,1:-1,Ny-1]+f[3,1:-1,Ny-1]) #North
f[2,1:-1,0]=np.cos(np.pi*x[1:-1])*(1.0-w[0])-(f[1,1:-1,0]+f[3,1:-1,0]+f[4,1:-1,0]) #South
f[1,0,1:-1]=np.sinh(np.pi*(1-y[1:-1]))/np.sinh(np.pi)*(1.0-w[0])-(f[2,0,1:-1]+f[3,0,1:-1]+f[4,0,1:-1]) #West
f[3,Nx-1,1:-1]=-np.sinh(np.pi*(1-y[1:-1]))/np.sinh(np.pi)*(1.0-w[0])-(f[1,Nx-1,1:-1]+f[2,Nx-1,1:-1]+f[4,Nx-1,1:-1]) #East
#************Corner-Boundaries**********
#----------------NorthWest----------------------
f[1,0,Ny-1]=-(dxpn[0]+dypw[Ny-1])*tau*cs**2/2 -f[2,0,Ny-1]
f[4,0,Ny-1]=(dxpn[0]+dypw[Ny-1])*tau*cs**2/2 -f[3,0,Ny-1]
#----------------NorthEast----------------------
f[3,Nx-1,Ny-1]=(dxpn[Nx-1]-dype[Ny-1])*tau*cs**2/2 -f[2,Nx-1,Ny-1]
f[4,Nx-1,Ny-1]=-(dxpn[Nx-1]-dype[Ny-1])*tau*cs**2/2 -f[1,Nx-1,Ny-1]
#----------------SouthWest----------------------
f[1,0,0]=-(dxps[0]-dypw[0])*tau*cs**2/2 -f[4,0,0] +np.cos(np.pi*x[0])/3.0
f[2,0,0]=(dxps[0]-dypw[0])*tau*cs**2/2 -f[3,0,0] +np.cos(np.pi*x[0])/3.0
#----------------SouthEast----------------------
f[2,Nx-1,0]=-(dxps[Nx-1]+dype[0])*tau*cs**2/2 -f[1,Nx-1,0] +np.cos(np.pi*x[Nx-1])/3.0
f[3,Nx-1,0]=(dxps[Nx-1]+dype[0])*tau*cs**2/2 -f[4,Nx-1,0] +np.cos(np.pi*x[Nx-1])/3.0
#***********Macro********
p=(f[1,:,:]+f[2,:,:]+f[3,:,:]+f[4,:,:])/(1.0-w[0])
#*******Collision********
fp[0,:,:]=f[0,:,:]-(f[0,:,:]-(w[0]-1.0)*p[:,:])/tau # Collision Lattice Index 0
for k in range(1,5):
fp[k,:,:]=f[k,:,:]-(f[k,:,:]-w[k]*p[:,:])/tau # Collision Lattice Index 1-4
end=time.time();
runtime = end-start;
nodes_updated = mstep*Nx*Ny;
speed = nodes_updated/(1e6*runtime);
print('runtime=',runtime)
print('Mlups=',speed)
Show code cell output
runtime= 11.375726699829102
Mlups= 84.12815402943686
Show code cell source
# ---------------------- Calculating Gradients ------------------------------
dpx=np.zeros((Nx,Ny),dtype="float64")
dpy=np.zeros((Nx,Ny),dtype="float64")
u=np.zeros((Nx,Ny),dtype="float64")
v=np.zeros((Nx,Ny),dtype="float64")
dxr=-np.einsum('i,ixy->xy', cx, f)/(cs**2*tau)
dyr=-np.einsum('i,ixy->xy', cy, f)/(cs**2*tau)
u=np.einsum('i,ixy->xy', cx, f)*(1.0-1.0/(2.0*tau))
v=np.einsum('i,ixy->xy', cy, f)*(1.0-1.0/(2.0*tau))
# -------------------------- Plot Results -----------------------------------
fig1, (ax1,ax2,ax3) = plt.subplots(ncols=3,figsize=(18,4))
# -----------------------PLot-1-------------------------------
img1=ax1.imshow(np.rot90(p),cmap='jet', interpolation='none')
fig1.colorbar(img1, ax=ax1)
ax1.set_xlabel('$x$',fontsize=16)
ax1.set_ylabel('$y$',fontsize=16,rotation=0)
ax1.set_title("$Pressure$ $Field$",fontsize=14)
# -----------------------PLot-2-------------------------------
img2=ax2.imshow(np.rot90(u),cmap='jet', interpolation='none')
fig1.colorbar(img2, ax=ax2)
ax2.set_xlabel('$x$',fontsize=16)
ax2.set_ylabel('$y$',fontsize=16,rotation=0)
ax2.set_title("$x-Velocity$ $Field$",fontsize=14)
# -----------------------PLot-3-------------------------------
img3=ax3.imshow(np.rot90(v),cmap='jet', interpolation='none')
fig1.colorbar(img3, ax=ax3)
ax3.set_xlabel('$x$',fontsize=16)
ax3.set_ylabel('$y$',fontsize=16,rotation=0)
ax3.set_title("$y-Velocity$ $Field$",fontsize=14)
fig1.show()
Show code cell source
#----------------------------- Analytical-Slution --------------------------------------
yl, xl =np.meshgrid(x,y)
pana=np.cos(np.pi*xl)*np.sinh(np.pi*(1-yl))/np.sinh(np.pi)
dxp=-np.pi*np.sin(np.pi*xl)*np.sinh(np.pi*(1-yl))/np.sinh(np.pi)
dyp=-np.pi*np.cos(np.pi*xl)*np.cosh(np.pi*(1-yl))/np.sinh(np.pi)
Show code cell source
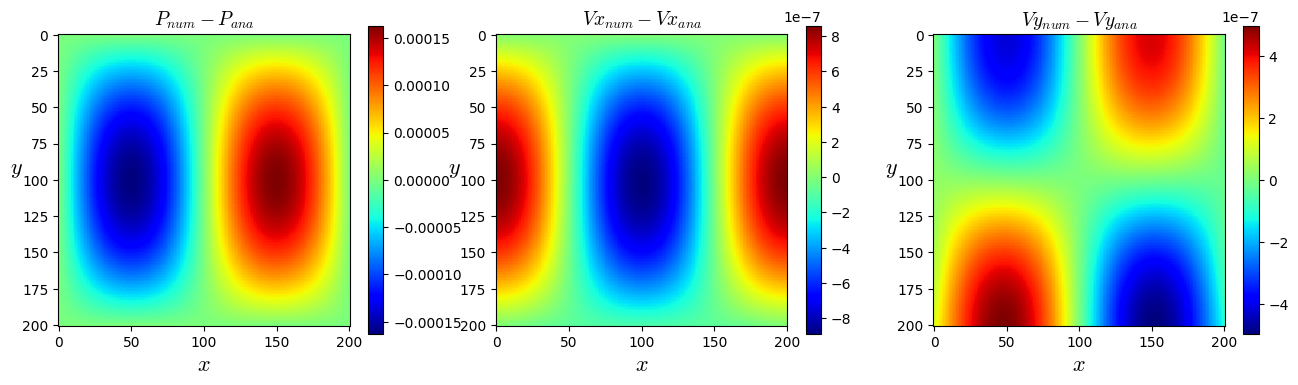
fig1, (ax1,ax2,ax3) = plt.subplots(ncols=3,figsize=(16,4))
# -----------------------PLot-1-------------------------------
img1=ax1.imshow(np.rot90(p-pana),cmap='jet', interpolation='none')
fig1.colorbar(img1, ax=ax1)
ax1.set_xlabel('$x$',fontsize=16)
ax1.set_ylabel('$y$',fontsize=16,rotation=0)
ax1.set_title("$P_{num}-P_{ana}$",fontsize=14)
# -----------------------PLot-2-------------------------------
img2=ax2.imshow(np.rot90(u+dxp*dt/dx),cmap='jet', interpolation='none')
fig1.colorbar(img2, ax=ax2)
ax2.set_xlabel('$x$',fontsize=16)
ax2.set_ylabel('$y$',fontsize=16,rotation=0)
ax2.set_title("$Vx_{num}-Vx_{ana}$",fontsize=14)
# -----------------------PLot-3-------------------------------
img3=ax3.imshow(np.rot90(v+dyp*dt/dx),cmap='jet', interpolation='none')
fig1.colorbar(img3, ax=ax3)
ax3.set_xlabel('$x$',fontsize=16)
ax3.set_ylabel('$y$',fontsize=16,rotation=0)
ax3.set_title("$Vy_{num}-Vy_{ana}$",fontsize=14)
fig1.show()
Show code cell source
fig1, (ax1,ax2,ax3,ax4) = plt.subplots(ncols=4,figsize=(28,6))
fig1.suptitle(r"$Gradient$ $Pressure$ $Comparison$",fontsize=14)
# -----------------------PLot-1-------------------------------
ax1.plot(x,-dxp[int((Nx-1)/2),:],'k-',label='Analytical')
ax1.plot(x,u[int((Nx-1)/2),:]*dx/dt,'r--',label='Numerical')
ax1.set_xlim(0,1);ax1.set_ylim(0,3.5)
ax1.legend(fontsize=14)
ax1.set_xlabel('$y$',fontsize=16)
ax1.set_ylabel('$u_{x}(0.5,y)$',fontsize=16)
# -----------------------PLot-2-------------------------------
ax2.plot(y,-dyp[int((Nx-1)/2),:],'k-',label='Analytical')
ax2.plot(y,v[int((Nx-1)/2),:]*dx/dt,'r--',label='Numerical')
ax2.set_xlim(0,1);ax2.set_ylim(-1,1.)
ax2.legend(fontsize=14)
ax2.set_xlabel('$y$',fontsize=16)
ax2.set_ylabel('$u_{y}(0.5,y)$',fontsize=16)
# -----------------------PLot-3-------------------------------
ax3.plot(x,-dxp[:,int((Nx-1)/2)],'k-',label='Analytical')
ax3.plot(x,u[:,int((Nx-1)/2)]*dx/dt,'r--',label='Numerical')
ax3.set_xlim(0,1);ax3.set_ylim(0,0.7)
ax3.legend(fontsize=14)
ax3.set_xlabel('$x$',fontsize=16)
ax3.set_ylabel('$u_{x}(x,0.5)$',fontsize=16)
# -----------------------PLot-4-------------------------------
ax4.plot(y,-dyp[:,int((Nx-1)/2)],'k-',label='Analytical')
ax4.plot(y,v[:,int((Nx-1)/2)]*dx/dt,'r--',label='Numerical')
ax4.set_xlim(0,1);ax4.set_ylim(-1,1.)
ax4.legend(loc=1,fontsize=14)
ax4.set_xlabel('$x$',fontsize=16)
ax4.set_ylabel('$u_{y}(x,0.5)$',fontsize=16)
fig1.show()

Show code cell source
Errop=np.sqrt(np.sum((p-pana)**2))/np.sqrt(np.sum((pana)**2))
print('ErroP=',Errop)
ErroDxp=np.sqrt(np.sum((dxr-dxp*dx)**2))/np.sqrt(np.sum((dxp*dx)**2))
print('ErroDxP=',ErroDxp)
ErroDyp=np.sqrt(np.sum((dyr-dyp*dx)**2))/np.sqrt(np.sum((dyp*dx)**2))
print('ErroDyP=',ErroDyp)
ErroU=np.sqrt(np.sum((u+dxp*dt/dx)**2))/np.sqrt(np.sum((dxp*dt/dx)**2))
print('ErroU=',ErroU)
ErroV=np.sqrt(np.sum((v+dyp*dt/dx)**2))/np.sqrt(np.sum((dyp*dt/dx)**2))
print('ErroV=',ErroV)
Show code cell output
ErroP= 0.00028686139633696267
ErroDxP= 0.0005911290130148428
ErroDyP= 0.00030410178129063444
ErroU= 0.0005911290130149131
ErroV= 0.00030410178129050027
Show code cell source
Ep0 = np.array([7.581804223832276e-05,1.9455755168783066e-05,3.516132010721964e-06])
Eu0 = np.array([0.0006494761036563891,0.00016159075773188218,4.0610389371128424e-05])
Ev0 = np.array([0.0006276179205283175,0.00015809795152452036,4.0377973496062506e-05])
Ep1 = np.array([0.00014879659187283224,3.820589700871858e-05,9.463298002459788e-06])
Eu1 = np.array([0.000970989709570425,0.00024123452788356743,6.011830955335574e-05])
Ev1 = np.array([0.0009217796134524976,0.00023270365330683272,5.8498500603119967e-05])
Malha=np.array([51,101,201])
Show code cell source
print(Ep0)
TEp=np.polyfit(np.log(Malha), np.log(Ep0), 1)
print(TEp)
Show code cell output
[7.58180422e-05 1.94557552e-05 3.51613201e-06]
[-2.23946394 -0.62518438]
Show code cell source
print(Eu0)
TEu=np.polyfit(np.log(Malha), np.log(Eu0), 1)
print(TEu)
Show code cell output
[6.49476104e-04 1.61590758e-04 4.06103894e-05]
[-2.02126162 0.6045687 ]
Show code cell source
print(Ev0)
TEv=np.polyfit(np.log(Malha), np.log(Ev0), 1)
print(TEv)
Show code cell output
[6.27617921e-04 1.58097952e-04 4.03779735e-05]
[-2.00048166 0.48802413]
Show code cell source
matplotlib.rcParams['mathtext.fontset'] = 'cm'
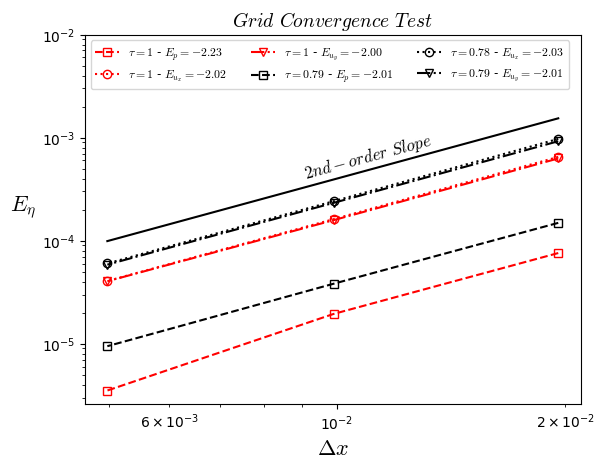
plt.title("$Grid$ $Convergence$ $Test$",fontsize=14)
plt.loglog(1/Malha,Ep0,'rs--',fillstyle='none', label='$\\tau=1$ - $E_{p}=-2.23$')
plt.loglog(1/Malha,Eu0,'ro:',fillstyle='none', label='$\\tau=1$ - $E_{u_{x}}=-2.02$')
plt.loglog(1/Malha,Ev0,'rv-.',fillstyle='none', label='$\\tau=1$ - $E_{u_{y}}=-2.00$')
plt.loglog(1/Malha,Ep1,'ks--',fillstyle='none', label='$\\tau=0.79$ - $E_{p}=-2.01$')
plt.loglog(1/Malha,Eu1,'ko:',fillstyle='none', label='$\\tau=0.79$ - $E_{u_{x}}=-2.03$')
plt.loglog(1/Malha,Ev1,'kv-.',fillstyle='none', label='$\\tau=0.79$ - $E_{u_{y}}=-2.01$')
plt.loglog(1/Malha,4.*1.0/(Malha**2),'k-',fillstyle='none')
plt.text(0.009, 0.0004, "$2nd-order$ $Slope$", rotation=15,fontsize=12)
plt.ylim(0,0.01)
plt.legend(loc=2,ncol=3,fontsize=8.5)
plt.ylabel('$E_{\eta}$',fontsize=16,rotation=0,horizontalalignment='right')
plt.xlabel('$\Delta x$',fontsize=16)
plt.show()
# plt.savefig('conv', dpi=300, bbox_inches='tight')